Routes
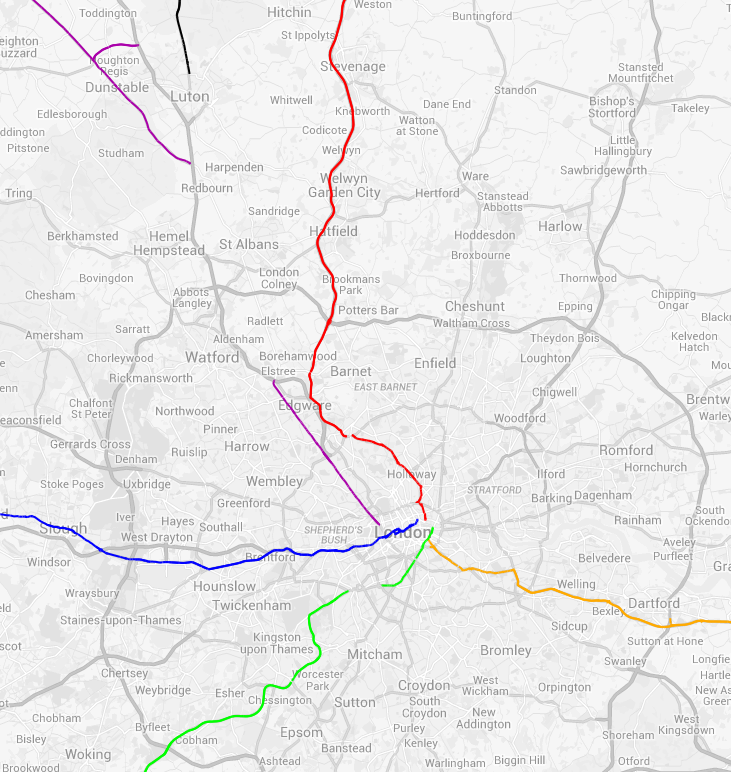
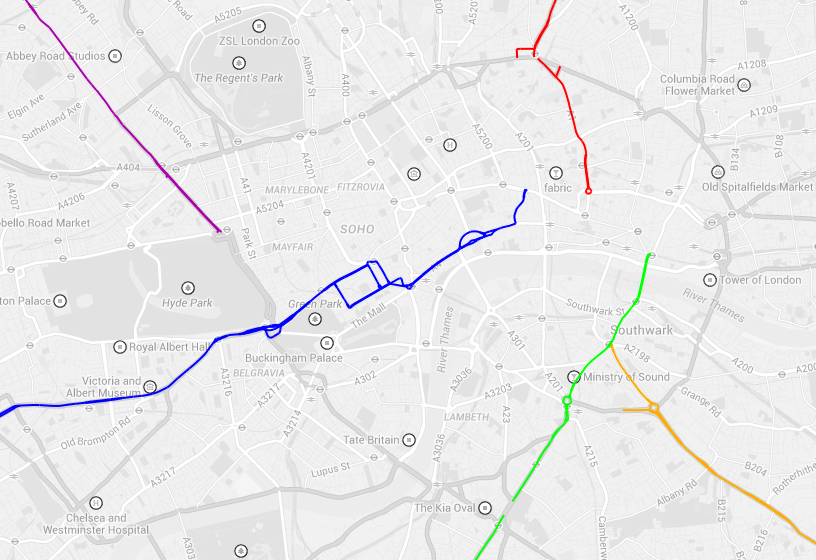
I created GPX route files for the challenge. These were created manually in QGIS, using the OpenStreetMap standard “Mapnik” render as a background, by drawing lines, with Google Street View imagery used to check restrictions.
I split each team’s route into 12 stages (so 36 altogether), which were initially each just over 10km and ended at a docking station. Each stage contained between 10 and 40 sequential legs to docking stations. I’m not sure I would trust proper routing engines (based on Google Maps or OpenStreetMap, normally) to have found better routes on each leg between each docking station, than me and Google Street View, largely because many London boroughs have been experimenting a lot recently with Low Traffic Neighbourhoods (LTNs) and modal filters (e.g. two way for bikes/one way for cars). But I did run a TSP solver (RouteXL) on 3 of the stages and in 2 cases it did find a slightly shorter ordering of the legs, within the stage. So I would probably use a TSP solver more for a future iteration of the challenge.
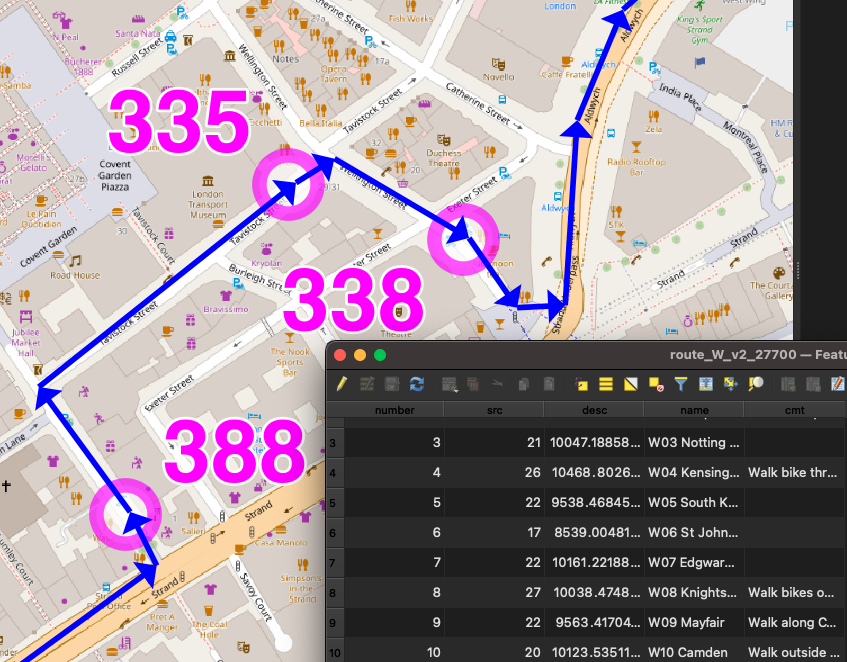
The three route/team files were saved in British National Grid (EPSG27700) GeoJSONs (technically not allowed by the spec) so I could get proper metre distances ($length) auto-updated into a column, for each stage, during planning. The stages had a number column, and were numbered sequentially. Having a number column results in LineStrings in the GeoJSONs and GPX routes/routepoints rather than single MultiLineStrings and GPX tracks/trackpoints. They were then saved as WGS84 GPX files. I (mis-)used a very limited set of column names (name, number, src, desc, cmt), due to the restrictions with the GPX specification – I didn’t want to use GPX extensions.
It was important to have three separate GPX files so that each team would need to load in just a single file to their navigation device and not see docking stations/routes from other teams). But it did make preparations a bit harder for the online map.
The docking stations were imported in via a TSV file, then saved as GPX waypoints (column names again restricted to src, desc, name, and cmt), and the relevant ones were manually appended to the GPX team files. The GeoJSONs were retained as my master editing files, as QGIS cannot easily edit GPX files due to them containing multiple geometry types.
I would certainly like to try a more automated approach to the routing. It did take a substantial amount of time – probably two evenings for each of the three routes, and a further evening for each route to enumerate the docking stations, fine-tune the routes and reorder any sliced up GeoJSON LineString segments (part-stages) back into the correct sequence. The reordering was needed as QGIS would incorrectly reorder parts of the route that crossed over itself, when it was sliced up.
But an automated approach would require a method that deals with docking stations that are just 10m down a no-entry street (so you’d just walk it), which is hard. Currently they are represented as a point defined by TfL through their API (and separately in OpenStreetMap) which may be the location of the “totem pole” kiosk but not the docking points themselves. In routing or GIS systems, the docking station needs to be represented as an area (within which you would walk the bikes) plus a (multi-)line (representing the line of dock points – some of these are quite long – some have significant gaps, and sometimes they are split on either side of a road). Potentially, the point representing a docking station really needs to be an area, and that area can extend up to the nearby road junction to deal with the one-way issue.
Future Improvements
In terms of the general design, a few things could be changed for a future challenge (some of these I mentioned in my previous blog post):
- Ensuring that participants are well away from the finish at around the 60-80% stage, so that they are less likely to bail at that difficult time of the day, because the remainder of the challenge is then a kind of “run in” to the finish, rather than routing them away at a late stage.
- When participants pass by another docking station twice, they should visit it on the first occasion, not the second time. (An exception is when it is on the wrong side of a dual carriageway, particularly one with a median barrier). Otherwise there is a danger of it being missed on the return.
- Build specific meal stops in.
- Maximum of 200 docking stations/10 hours per team.
The Web Map
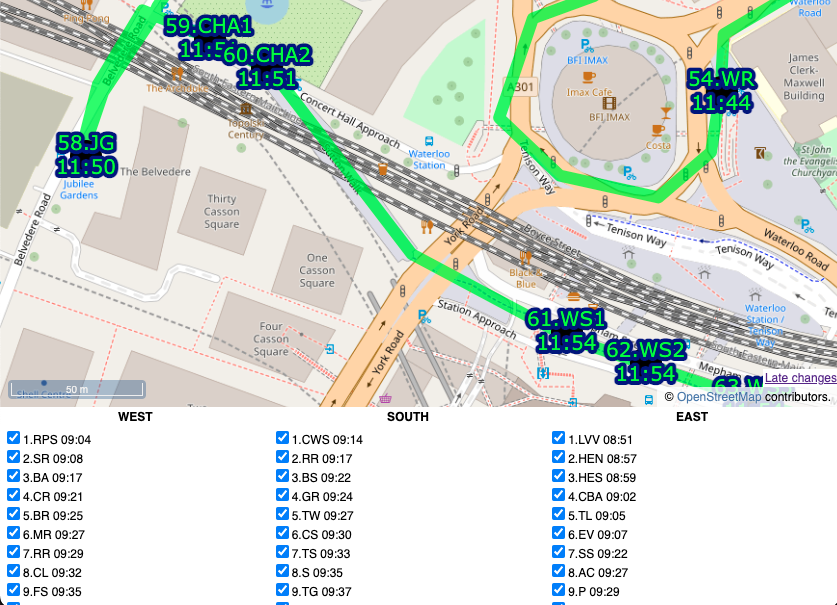
By comparison, building the web map was straightforward, probably just one evening’s work to build the map page itself as a basic OpenLayers map reading in GPX files and with simple browser-based geolocation, and one further evening to build a “team” version of the map that allowed ticking off the stations, the action being stored in a database, and a time string echoed back to the web map (and other viewers, on a Javascript timer) as confirmation. The database had two tables, a summary table with a row per docking station, and an action log which recorded the dock’s TfL ID, timestamp, event type and the submitter’s browser user agent string ($_SERVER[‘HTTP_USER_AGENT’]) in lieu of logins/IDs. It was fairly easy to assign a manually assign each user agent to team, post-event.
Each docking station ended up with 4 identifiers which feels a bit too many, but it kind of made sense:
- an integer TfL ID (e.g. 761)
- the TfL Name that appears on the totem pole (e.g. Gower Place, Bloomsbury)
- a shortcode which was the sequence number and the initials of the first part of the TfL Name (e.g. 37.GP). There were some duplicates across the team. FIN.HS was a special shortcode for the finish for the two teams that didn’t have that as a docking station in their “zone”. One newly added docking station had “A” appended to the sequence number of the previous, rather than having to renumber everything.
- a unique sequence code which was the team, stage and docking station order within that stage, (e.g. W02.15). This was used as a logical ordering of the file and to help with assigning each docking station to its stage on the online map.
I also listed an “actual sequence” post-event ordering, e.g. W038, in the final results file.
I could have used the sequence code on the map but felt the shortcode was the most useful concise way of identifying each station to the team as they approached it, and hopefully the simple number would result in any missing out being spotted quickly.
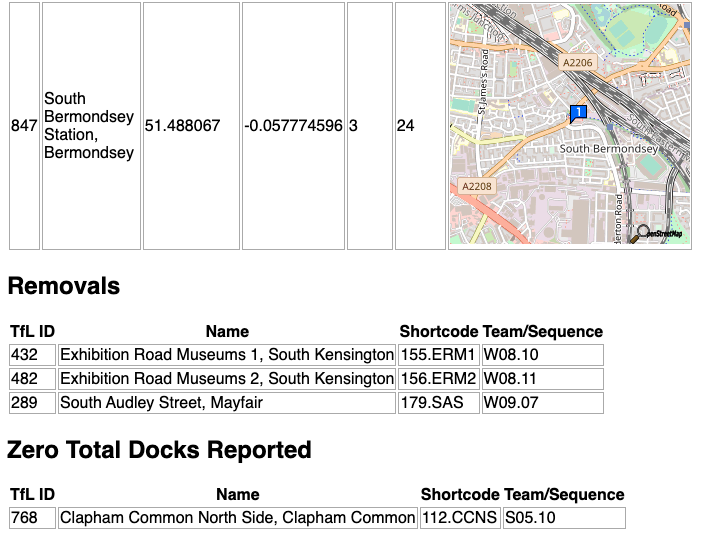
I built a special “diff” webpage that compares our docks file with the live data (via BikeShareMap) every 2 minutes and this alerted us of any new, closed or zero-capacity docking stations, plus a list of full ones. There was one that opened a few days before, but none on the day, thankfully!
Future Improvements
I do think that using fewer intermediate routing points on each leg would be better and would allow for turn-by-turn satnav directions. Having said that, having street names called out is of limited use as they are often hard to spot on the ground, so the breadcrumb trail approach we used worked well.
We had paper maps (just screenshots of the website) as a backup. I never used them, and I think Team South used the website. Team West used them exclusively, with a separate person using the website to tick off.
I would have liked to have had a single source of docking station locations. In the end, they were:
- on TfL’s API, which is fed through to a CSV on BikeShareMap every two minutes,
- on a CSV file on Github,
- as GPX waypoints appended to each team’s GPX routes file, and
- in my database for recording times on the ATDMap website.
1 and 2 were automatically compared (see above), 2 could be added to QGIS to compare and generate GPX for 3, and also imported into the database table (4) but this would all be manual steps.
Links
Website map with the timings: https://misc.oomap.co.uk/atdmap/
Route GPX files and timings CSV: https://github.com/oobrien/allthedocks
Strava link (Team East): https://www.strava.com/activities/7908548122