[Updated x2] Yesterday’s Ordnance Survey OpenData launch has provided the OpenStreetMap community with a potentially rich set of data to use to complete the map of Great Britain. OpenStreetMap’s accuracy and detail is generally excellent, however a problem which is (very arguably) more important than either accuracy or detail, in a map is that some parts of the country are substantially incomplete.
It’s not that the data quality is poor, it’s that someone with a GPS (or a satellite photo) has never been to that part of the country to gather the data in the first place. There are still significant parts of Scotland and Northern England which have many missing roads. The NPE (out-of-copyright) maps have been useful in starting to fill out these sections, but there’s always going to be a roads missing from a 60-year-old (or older) map.
So, the OS datasets could be very useful. Perhaps the most interesting of the datasets is Meridian 2, it is a vector dataset covering the whole country. One thing that needs to be watched out for though is that Meridian (which is a “complete” dataset of the country) is relatively inaccurate Pixellation or resolution isn’t a problem, it being vector based – but data is quite simplified.
I’ve built a mashup which allows direct comparision of the Meridian and OSM data for Great Britain. I’ve added in most of the available layer files that come with the Meridian package that has been released as part of the OS OpenData initative. The only two areal ones I’ve added are for woodland areas and lakes – everything is linear. I’ve added in labels for the roads and rivers, but no boundaries or point features, at this stage.
You can access the mashup here [now offline] (N.B. Not tested in IE so will probably break horribly in it.) Zooming in reveals the relative coarseness of the Meridian data – although crucially it is “substantially” complete for all but the smallest of roads, for the whole of the UK – not just for the major cities where the OSM contributors mostly live!
Completeness
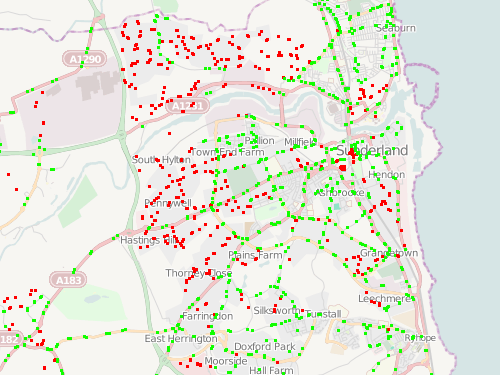
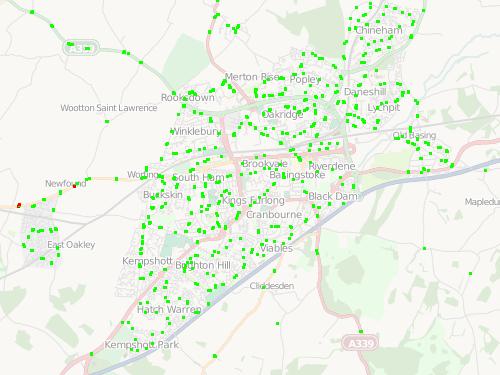
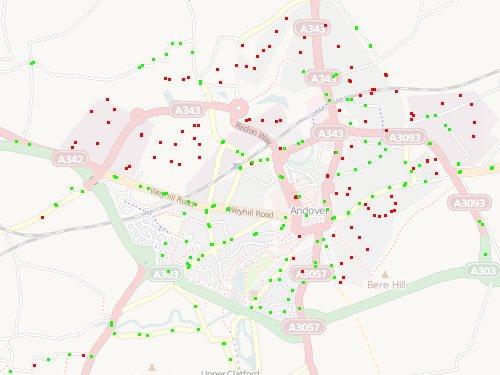
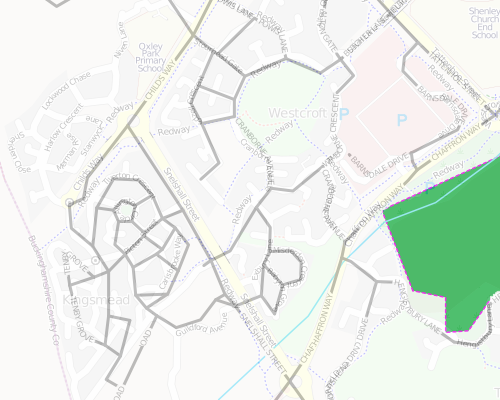
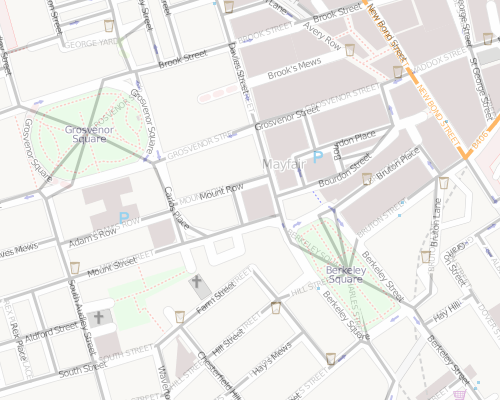
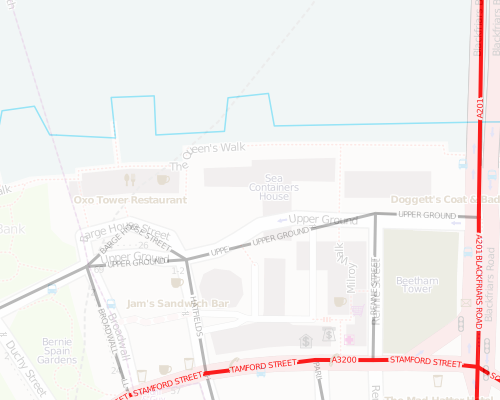
In the pictures below, the “solid”, thinner roads are Meridian and the fatter roads with “borders” are OSM.
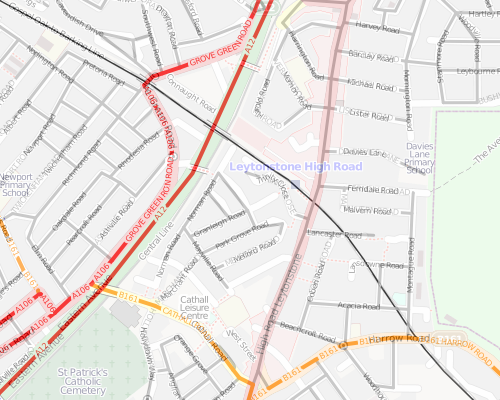
Spot the missing roads in Meridian around Leytonstone in East London [Update 1 – Some sections of motorway are missing from my rendering but are present in the data – it is possible this problem extends to smaller roads too so take these screenshots with a pinch of salt]:
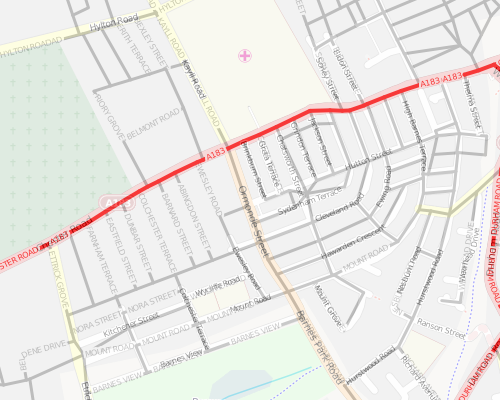
…but go further out of London, and it doesn’t look so good for OSM:
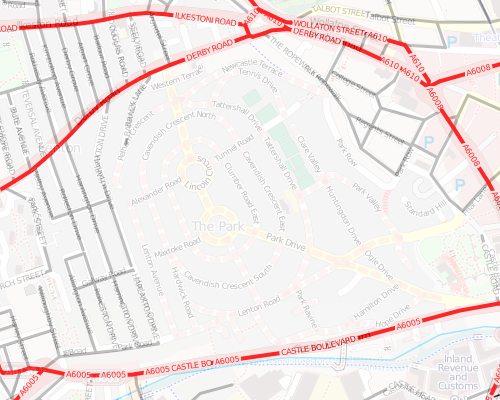
Interestingly, the Park Estate in central Nottingham is missing entirely from Meridian:
The Park Estate is a private estate and the roads are not maintained by the council – this might have something to do with it. I’ll be running around the Park Estate next weekend.
Accuracy
[Update 2 – Meridian is not intended to be used at scales larger than 1:50000, as per its documentation, so I shouldn’t really be comparing it with OSM which generally is based on data recorded at larger scales. So, bear in mind these screenshots are all larger than 1:50000 scale.] It’s difficult to authoritatively judge the relative accuracies of the two datasets without getting out on the streets or looking at aerial imagery – but you can infer a basic measure of accuracy by looking at how roads “wiggle” – or, in the case of the Mayfair squares below, how Meridian converges the square to a point:
Detail
A little unfair to compare the two here, as Meridian 2 was always meant to be a medium-scale dataset, whereas OSM can be all things to all people!
The tiles that make up the imagery are generated on demand (and cached for subsequent use) so may run slowly. You’ll need to zoom in quite a long way before all the features get added to the map. Use the slider on the top left to fade between the OSM and Meridian layers.
The images are derived from Ordnance Survey data © Crown copyright and database right 2010 and OpenStreetMap data which is CC-By-SA OSM and contributors.